Seeker | Autonomous Robot
MAE UCSD Course Project
About
General Info
This team project conducted through a UCSD course developed our skills in programing, embedded systems, design, and teamwork. Our robocar, the Seeker, is designed to search for, locate, navigate to, and collect red ping pong balls (an easy light-weight object to demonstrate functionality).
Design
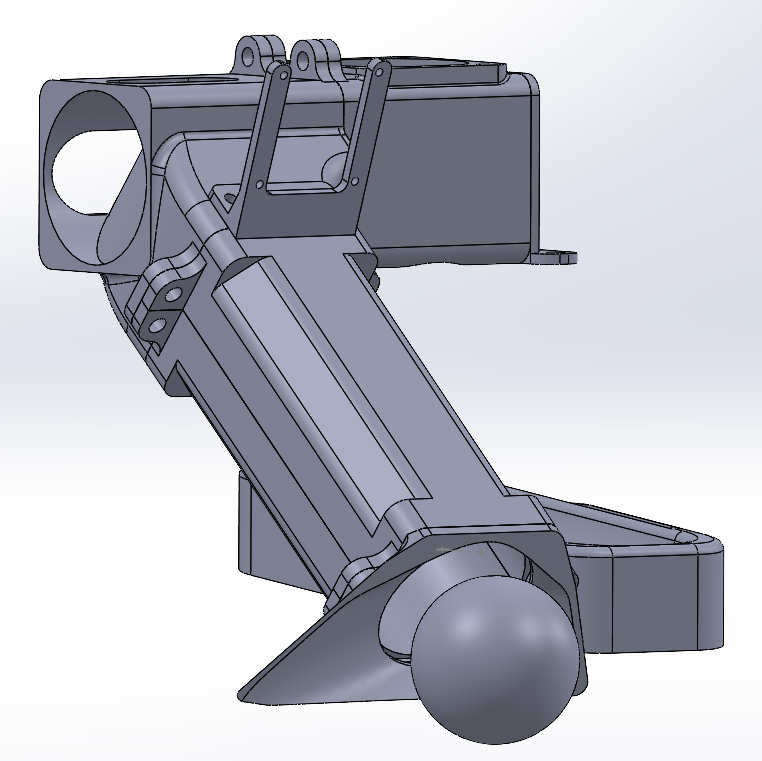
CAD Development
The inspiration for this design was to create a simple non-dynamic mechanism that could reliantly retrieve ping-pong balls. Using my prior knowledge, skill, and experience, I designed with the intent to 3D fabricate these components.
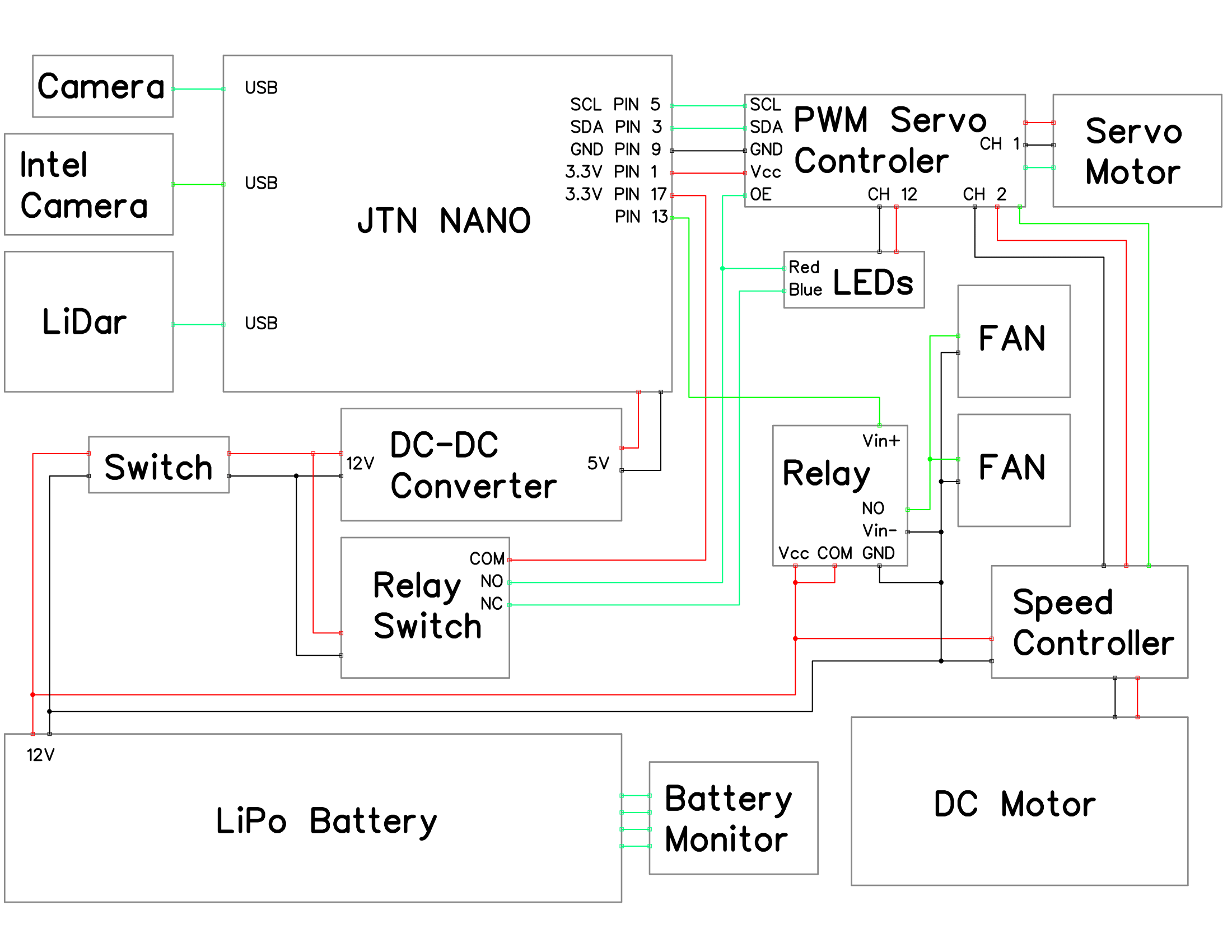
Schematics
Electronics
Shown above is a crude schematic of the robot's electronic harness. The course guided our development of this schematic outline, however I personally composed the schematic.