Arm Remote
Hexapod Walking Robot Controller

About
General Info
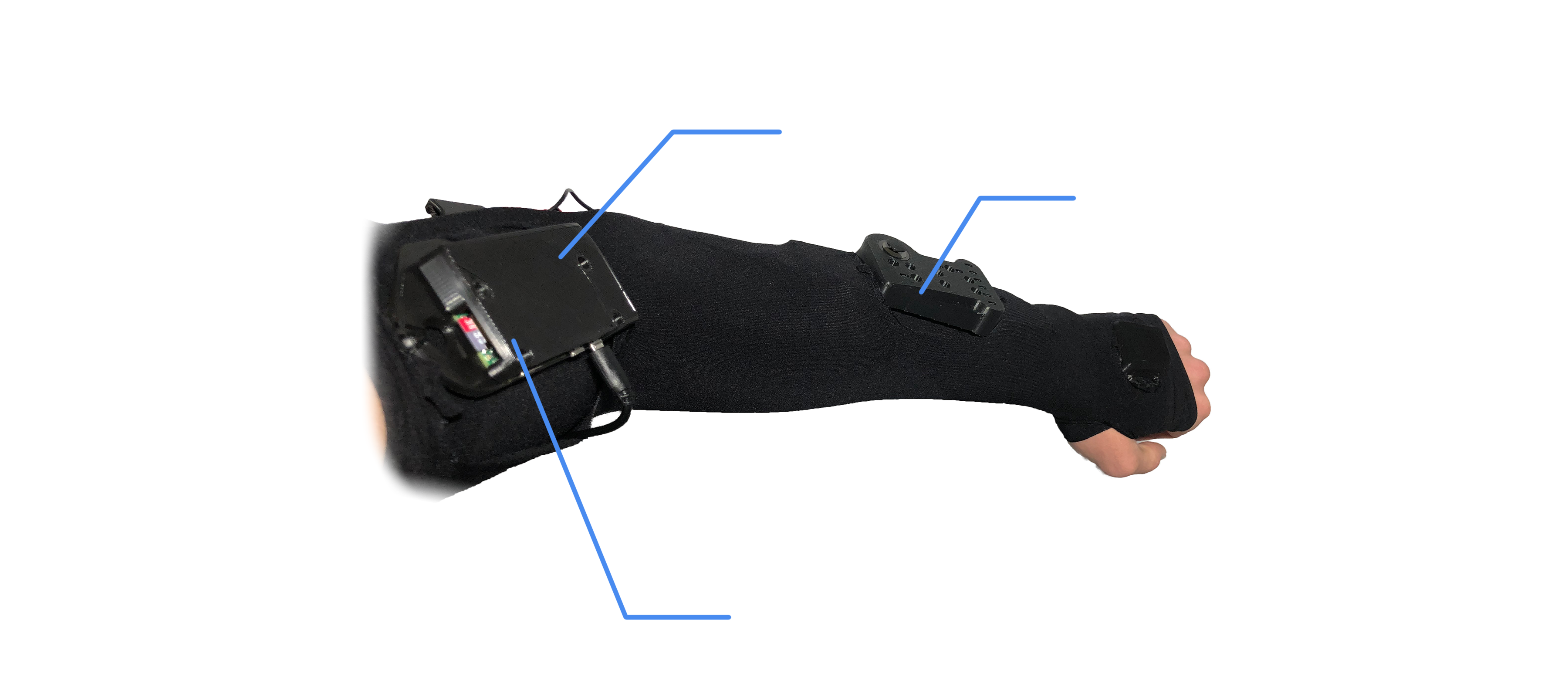
The arm remote was specifically intended and designed to be used in conjunction with the hexapod robot project, Podex. The mechanism was a fully operational transmitter fitted with a battery, Raspberry Pi Mini, the interface control panel, and a 9 axis accelerometer. The main construction of the arm remote is two compression sleeves that were cut and sewed for the electronic modules. All electronic modules are connected with hidden wire in between the two sandwiched arm sleeves. Using the Arm Remote inputs such as buttons, joysticks, and hand motions, the hexapod robot would be instructed to perform its tasks.



Features
Project Functionalities
Design
Wearable Tech
This Arm Remote was heavily inspired by the vision of futuristic technology being worn on the individual and user. Similar to a sci-fi movie with a wrist band as a computer screen and controller, this Arm Remote would perform similar functions. On the upper arm of the sleeve resided the lipo 7.4V battery and computer module. On the forearm resided the control interface, and on the hand, the accelerometer.
Accelerometer
Hand Motion Input
One of the most unique features about the arm is the accelerometer integrated into the hand of the arm sleeve. The accelerometer was used for the gyro, recording rotation of the hand in all directions. This data would then be sent to the robot to update either the robot's lateral position, or angle of the robot's main body frame itself.
R&D
Analog Signals
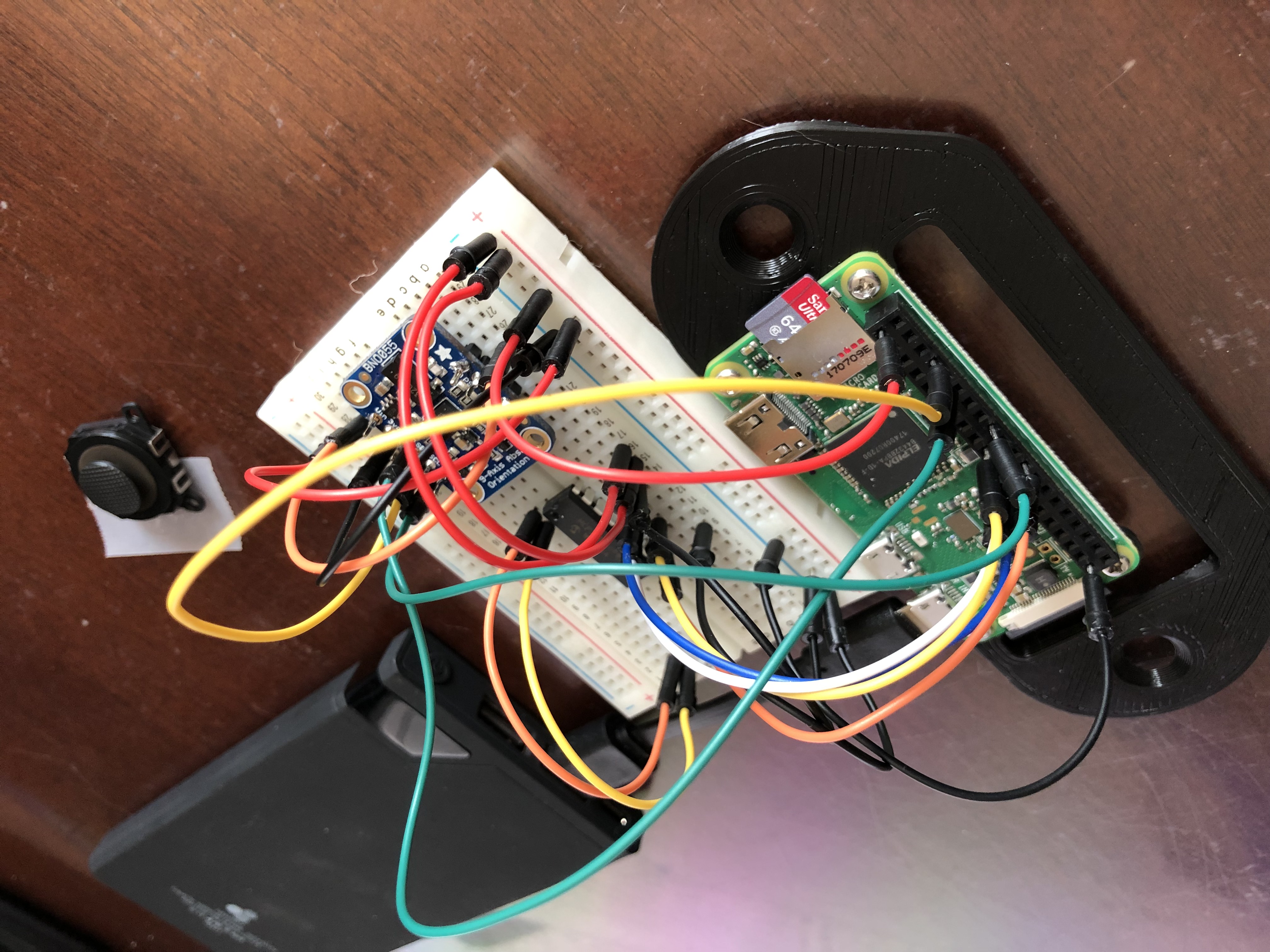
Before this project I had only worked with digital PWM signals. A joystick that was integrated into the interface on the other hand used analog signals. Raspberry Pi boards cannot read analog signals, meaning my build required the use of a specific IC to convert the analog signals into PWM. To understand how to use this IC, I conducted tests with breadboards.